Προηγούμενο
Εργαστήριο : mini250.gr
Επόμενο
Εξαρτήματα ( FPV Drone )
Ηλεκτρονικά Εξαρτήματα
Data Link : είναι η λεγόμενη "τηλεκατεύθυνση". Μέσω αυτής έχουμε αμφίδρομη επικοινωνία μεταφοράς δεδομένων από και προς το χειριστήριο, που έχουμε στα χέρια μας και στον δέκτη που είναι στο UAV.
Η επιστροφή των δεδομένων από τον flight controller στο χειριστήριο μας ονομάζεται αλλιώς και “τηλεμετρία”.
Η επιστροφή των δεδομένων από τον flight controller στο χειριστήριο μας ονομάζεται αλλιώς και “τηλεμετρία”.
Τηλεχειριστήριο
Δέκτης

Video link ονομάζεται η διαδικασία μεταφοράς της εικόνας από το UAV στον χειριστή ή στον θάλαμο επιχειρήσεων ή στο live stream στο youtube.
Η λήψη εικόνας επιτυγχάνετε από την κάμερα που βρίσκεται στο μπροστινό μέρος του UAV.
Στην συνέχεια το βίντεο περνάει από τον flight controller και εμπλουτίζεται με το osd.
Τέλος το vtx στέλνει το βίντεο στον χειριστή.
Η λήψη εικόνας επιτυγχάνετε από την κάμερα που βρίσκεται στο μπροστινό μέρος του UAV.
Στην συνέχεια το βίντεο περνάει από τον flight controller και εμπλουτίζεται με το osd.
Τέλος το vtx στέλνει το βίντεο στον χειριστή.
FPV Goggles

Κάμερα μαζί με VTX

O Flight Controller είναι ο υπολογιστής πτήσης του UAV.
Βρίσκεται συνήθως τοποθετημένος στο κέντρο του και έχει ενσωματωμένο τους περισσότερους αισθητήρες που χρειάζεται για να αντιληφθεί την θέση του UAV.
Είναι υπεύθυνος να επεξεργαστεί τα δεδομένα πτήσης, τις εντολές του χειριστή, την κατάσταση του UAV και στη συνέχεια να στείλει δεδομένα στους ελεγκτές στροφών των κινητήρων ώστε να εκτελεστεί η πτήση.
Βρίσκεται συνήθως τοποθετημένος στο κέντρο του και έχει ενσωματωμένο τους περισσότερους αισθητήρες που χρειάζεται για να αντιληφθεί την θέση του UAV.
Είναι υπεύθυνος να επεξεργαστεί τα δεδομένα πτήσης, τις εντολές του χειριστή, την κατάσταση του UAV και στη συνέχεια να στείλει δεδομένα στους ελεγκτές στροφών των κινητήρων ώστε να εκτελεστεί η πτήση.
Flight Controller

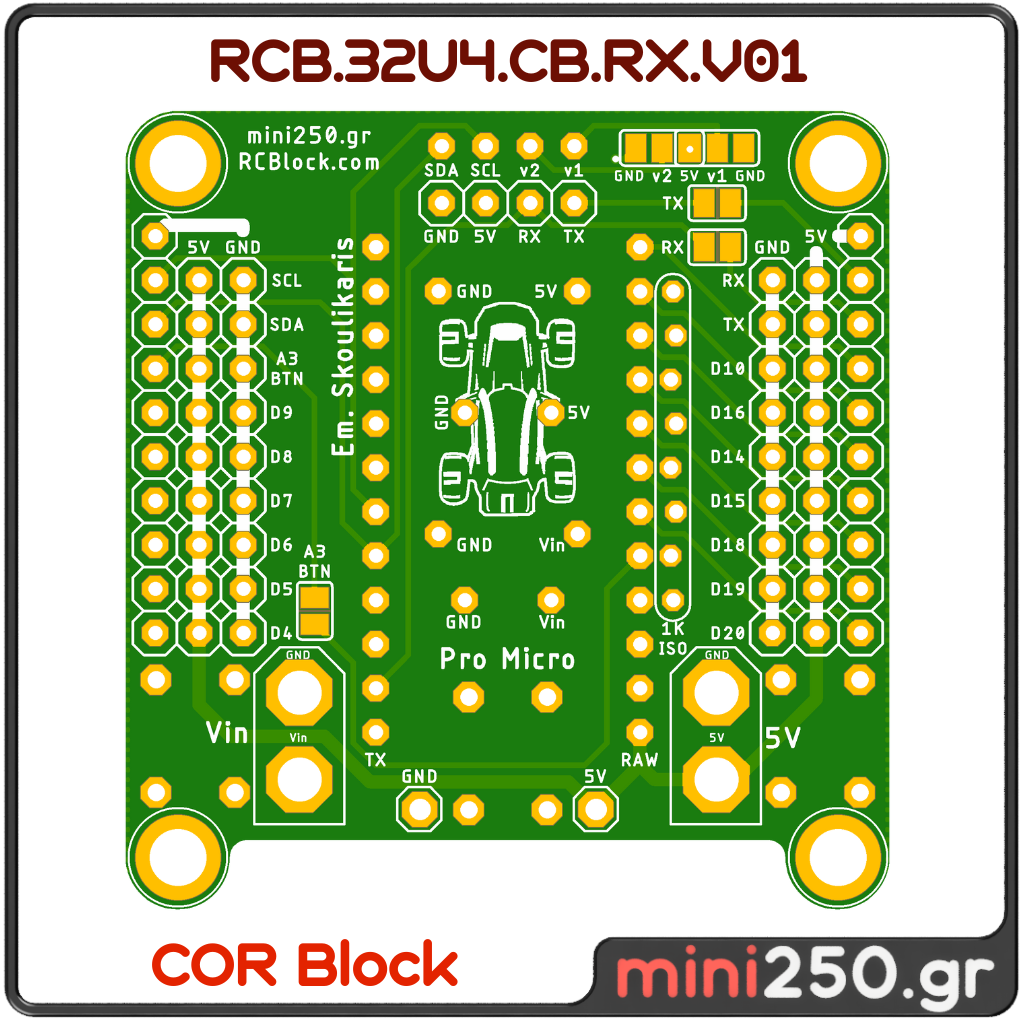
Ανάλογα με τον σκοπό και την αποστολή του UAV που σχεδιάζουμε υπάρχει η περίπτωση να χρειαστεί να άλληλεπιδράσουμε με διαφορετικού τύπου payload.
Στην περίπτωση που έχουμε προβολείς θα πρέπει να τους δώσουμε ρεύμα από την μπαταρία
Στην περίπτωση που έχουμε σύστημα απελευθέρωσης θα πρέπει να ελέγξουμε τον γάντζο ή τον ηλεκτροκινητήρα ο οποίος θα απελευθερώσει το φορτίο.
Στην περίπτωση που έχουμε μεγάφωνο θα πρέπει να έχουμε έναν ελεγκτή ήχου ο οποίος θα οδηγήσει το μεγάφωνο.
Καθώς είναι πολύ μεγάλη λίστα των εξαρτημάτων που μπορούμε να βάλουμε, παρακάτω έχω σχεδιάσει έναν ελεγκτή ο οποίος μπορεί να πρόγραμματιστεί με το framework του arduino εύκολα και γρήγορα.
Στην περίπτωση που έχουμε προβολείς θα πρέπει να τους δώσουμε ρεύμα από την μπαταρία
Στην περίπτωση που έχουμε σύστημα απελευθέρωσης θα πρέπει να ελέγξουμε τον γάντζο ή τον ηλεκτροκινητήρα ο οποίος θα απελευθερώσει το φορτίο.
Στην περίπτωση που έχουμε μεγάφωνο θα πρέπει να έχουμε έναν ελεγκτή ήχου ο οποίος θα οδηγήσει το μεγάφωνο.
Καθώς είναι πολύ μεγάλη λίστα των εξαρτημάτων που μπορούμε να βάλουμε, παρακάτω έχω σχεδιάσει έναν ελεγκτή ο οποίος μπορεί να πρόγραμματιστεί με το framework του arduino εύκολα και γρήγορα.
RCB.32U4.CB.RX.V01 PCB-0005
Ο δέκτης gps είναι ένα από τα βασικότερα εξαρτήματα πάνω στο uav καθώς δέχεται τα σήματα από τους δορυφόρους και μπορεί να υπολογίσει την θέση του uav στον χώρο.
Ανάλογα με το mission που τρέχουμε, υπάρχει περίπτωση να έχουμε αυτόνομη πτήση του μηχανήματος, η οποία εκτελείται κατά κύριο λόγο από τις συντεταγμένες που έχουμε δώσει στο μηχάνημα και την πραγματική θέση του μηχανήματος.
Επίσης όπως αναφέραμε προηγουμένως στην ασφαλή διαχείριση αποτυχίας το gps είναι υπεύθυνο για να επαναφέρει το μηχάνημα στην θέση από την οποία ξεκίνησε ή στην ασφαλή θέση προσγείωσης.
Επίσης επειδή ένα uav κινείται αρκετά γρήγορα υπάρχει περίπτωση να χαθούν ορισμένα πακέτα από το δορυφόρο μέχρι τον δέκτη. Χρησιμοποιώντας την πυξίδα, η οποία μας δίνει μεγαλύτερη ακρίβεια σε σχέση με την κίνηση του μηχανήματος. Υπάρχει πιθανότητα, λοιπόν, κατά την εκκίνηση της κίνησης ο offline controller να βασιστεί περισσότερο στην πυξίδα και λιγότερο στο gps και στη συνέχεια όταν έχει ακριβή δεδομένα του gps να διορθώσει την θέση του.
Πυξίδα είναι ένα από τα πιο ήπουλα εξαρτήματα πάνω στο μηχάνημα καθώς μπορεί να μας ρίξει το μηχάνημα σε δευτερόλεπτα εάν δεν είναι σωστά ρυθμισμένη μεγάλ προσοχή στην πυξίδα
Ανάλογα με το mission που τρέχουμε, υπάρχει περίπτωση να έχουμε αυτόνομη πτήση του μηχανήματος, η οποία εκτελείται κατά κύριο λόγο από τις συντεταγμένες που έχουμε δώσει στο μηχάνημα και την πραγματική θέση του μηχανήματος.
Επίσης όπως αναφέραμε προηγουμένως στην ασφαλή διαχείριση αποτυχίας το gps είναι υπεύθυνο για να επαναφέρει το μηχάνημα στην θέση από την οποία ξεκίνησε ή στην ασφαλή θέση προσγείωσης.
Επίσης επειδή ένα uav κινείται αρκετά γρήγορα υπάρχει περίπτωση να χαθούν ορισμένα πακέτα από το δορυφόρο μέχρι τον δέκτη. Χρησιμοποιώντας την πυξίδα, η οποία μας δίνει μεγαλύτερη ακρίβεια σε σχέση με την κίνηση του μηχανήματος. Υπάρχει πιθανότητα, λοιπόν, κατά την εκκίνηση της κίνησης ο offline controller να βασιστεί περισσότερο στην πυξίδα και λιγότερο στο gps και στη συνέχεια όταν έχει ακριβή δεδομένα του gps να διορθώσει την θέση του.
Πυξίδα είναι ένα από τα πιο ήπουλα εξαρτήματα πάνω στο μηχάνημα καθώς μπορεί να μας ρίξει το μηχάνημα σε δευτερόλεπτα εάν δεν είναι σωστά ρυθμισμένη μεγάλ προσοχή στην πυξίδα
BLITZ M10 GPS RC-005
Esc ή αλλιώς electronic speed controller στα ελληνικά ηλεκτρονικός ριθμιστής σταθερών στροφών είναι το σύστημα το οποίο μετατρέπει τα δεδομένα των στροφών από τον εγκέφαλο σε τριφασικό εναλλασσόμενο ρεύμα για τους ηλεκτροκινητήρες του οχήματος
Συνήθως έχουμε δύο τύπους, είτε 4 σε ένα είτε μονωμένους.BLITZ E55 Single ESC RC-007
T-Motor F55A PROII 4-in-1 BLHeli-32 ESC 3-6S RC-024
Συνήθως έχουμε δύο τύπους, είτε 4 σε ένα είτε μονωμένους.
BLITZ E55 Single ESC RC-007
T-Motor F55A PROII 4-in-1 BLHeli-32 ESC 3-6S RC-024

O Control Tower / Stack ονομάζεται ο συνδυασμός του flight controller μαζί με τον esc. Συνήθως είναι κατασκευασμένα από την ίδια εταιρεία και μας διευκολύνει στην διαδικασία συναρμολόγησης και κατασκευής των μηχανημάτων.
Flight Controller

Brushless Motor ή αλλιώς τριφασικός ηλεκτροκινητήρας με μόνιμους μαγνήτες είναι ο ηλεκτροκινητήρας που έχει επικρατήσει, καθώς έχει την δυνατότητα να αλλάζει πολύ γρήγορα τις στροφές του. Δεν έχει καθόλου κινητά μέρη, τα οποία αναπτύρωνται εκτός από τα ρουλεμάν του και καθώς έχει τους μαγνήτες στο εξωτερικό κέλυφος μπορεί να εφαρμόσει μεγάλη ροπή και απόδοση σε σχέση με το μέγεθός του.
XING 2814 2-6S FPV Motor 880KV RC-010
XING 2814 2-6S FPV Motor 880KV RC-010

XING2 2207 4S FPV Motor 2750KV RC-038

Ο έλικας είναι το εξάρτημα το οποίο μετατρέπει την περιστροφική κίνηση του ηλεκτροκινητήρα σε κάθετη άνωση βάση του σχηματος του και των αεροδυναμικών χαρακτηριστικών του.
Nazgul 5.1X3.5X3 F5 Tri-blade Prop RC-039
Nazgul 5.1X3.5X3 F5 Tri-blade Prop RC-039

HQPROP 10X5X3 Macroquad Prop RC-013

Τα συστήματα που έχουμε πάνω σε ένα uav τροφοδοτούνται από 3 έως 4 διαφορετικά κυκλώματα με διαφορετικές τάσεις στο καθένα.
Το κύκλωμα ισχύος της μπαταρίας έχει την άμεση τάση από την μπαταρία και συνδέεται στον esc και στο payload management.
Στη συνέχεια έχουμε το κύκλωμα των 9 volt το οποίο συνήθως το συνδέουμε στην κάμερα και στα περιφερειακά εξαρτήματα και αισθητήρες του flight controller.
Έχουμε το κύκλωμα 5 volt στο οποίο συνδέουμε τον δέκτη της οθόνης, το gps, τα σέρβο για την σταθεροποίηση της κάμερας, τους ανεμιστήρες ψύξης, τον φωτισμό του οχήματος καθώς και άλλο περιφερειακό λειτουργείας στα 5 volt.
Ορισμένα μηχανήματα διαθέτουν ακόμα ένα κύκλωμα στα 4.5 volt το οποίο τροφοδοτείται από το usb όταν αυτό είναι συνδεδεμένο, χωρίς να χρειάζεται να ενεργοποιήσω με την μπαταρία και τα υπόλοιπα κυκλώματα. Σε αυτές τις περιπτώσεις, στο κύκλωμα συνδέουμε το gps και τον δέκτη ώστε να είναι σε κατάσταση standby μηχάνημα και να έχει κλειδωμένες συντεταγμένες για να μπορούμε να τον ενεργοποιήσουμε σε λιγότερο από 2 δευτερόλεπτα.
Για να γίνει ευκολότερη διαδικασία σύνδεσμολογίας όλων αυτών των εξαρτημάτων έχω σχεδιάσει το παρακάτω pdb ή αλλιώς powered distribution board.RCB.PDB.5040.V02 PCB-0017
Το κύκλωμα ισχύος της μπαταρίας έχει την άμεση τάση από την μπαταρία και συνδέεται στον esc και στο payload management.
Στη συνέχεια έχουμε το κύκλωμα των 9 volt το οποίο συνήθως το συνδέουμε στην κάμερα και στα περιφερειακά εξαρτήματα και αισθητήρες του flight controller.
Έχουμε το κύκλωμα 5 volt στο οποίο συνδέουμε τον δέκτη της οθόνης, το gps, τα σέρβο για την σταθεροποίηση της κάμερας, τους ανεμιστήρες ψύξης, τον φωτισμό του οχήματος καθώς και άλλο περιφερειακό λειτουργείας στα 5 volt.
Ορισμένα μηχανήματα διαθέτουν ακόμα ένα κύκλωμα στα 4.5 volt το οποίο τροφοδοτείται από το usb όταν αυτό είναι συνδεδεμένο, χωρίς να χρειάζεται να ενεργοποιήσω με την μπαταρία και τα υπόλοιπα κυκλώματα. Σε αυτές τις περιπτώσεις, στο κύκλωμα συνδέουμε το gps και τον δέκτη ώστε να είναι σε κατάσταση standby μηχάνημα και να έχει κλειδωμένες συντεταγμένες για να μπορούμε να τον ενεργοποιήσουμε σε λιγότερο από 2 δευτερόλεπτα.
Για να γίνει ευκολότερη διαδικασία σύνδεσμολογίας όλων αυτών των εξαρτημάτων έχω σχεδιάσει το παρακάτω pdb ή αλλιώς powered distribution board.
RCB.PDB.5040.V02 PCB-0017
Τέλος, έχουμε την μπαταρία η οποία μας δίνει την ενέργεια για την λειτουργία του οχήματος.
Συνήθως η μπαταρία είναι 4s ή 6s ανάλογα με τον τύπο του μηχανήματος.
TF Power-X 2400-4S MTAG RC-043
Συνήθως η μπαταρία είναι 4s ή 6s ανάλογα με τον τύπο του μηχανήματος.
TF Power-X 2400-4S MTAG RC-043
FPV Drone Εξαρτήματα
 Image Caption
Image Caption
Image Gallery