Προηγούμενο
Εργαστήριο : mini250.gr
Επόμενο
GPS & Compas
Work Info GPS
Το GPS (Global Positioning System) είναι ένα σύστημα παγκόσμιας θέσης που επιτρέπει σε έναν δέκτη, π.χ., στο κινητό ή στο αυτοκίνητο σου, να εντοπίσει την ακριβή του θέση, πάνω στη Γη.
Παρακάτω αναλύουμε πώς λειτουργεί αυτή η διαδικασία:
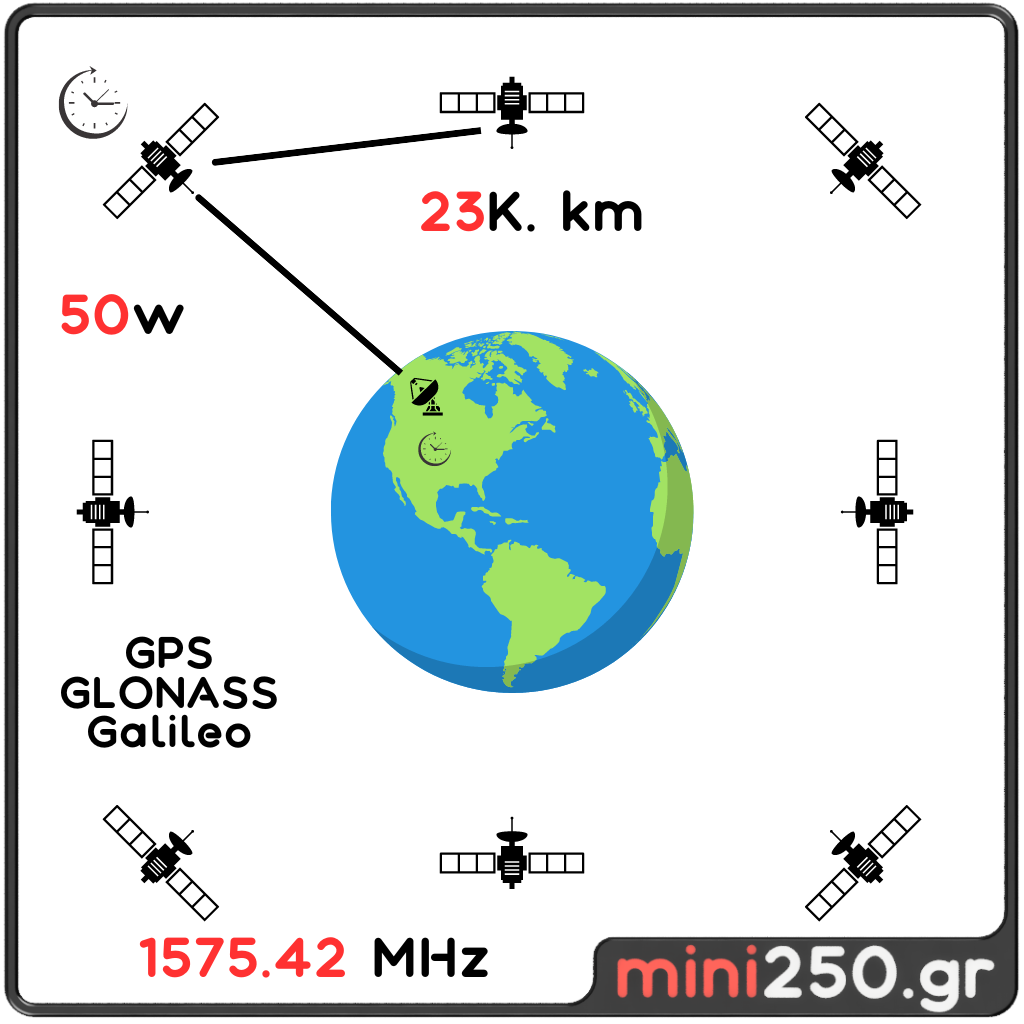
Για να λειτουργήσει σωστά, το σύστημα gps χρειάζεται 3 βασικά συστήματα :
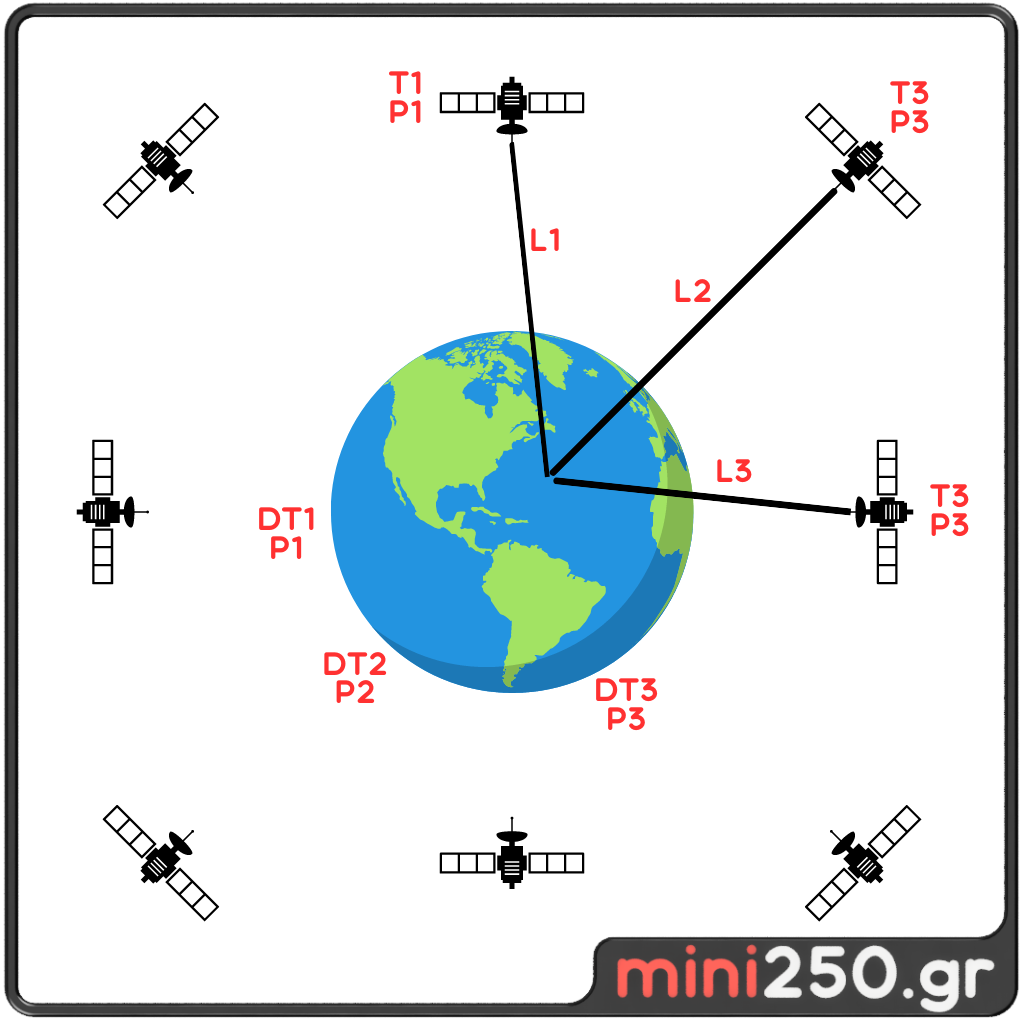
Το σύστημα GPS δουλεύει με την παρακάτω απλή διαδικασία :
Παρακάτω θα αναλύσουμε με περισσότερες λεπτομέρειες τον τρόπο με τον οποίο λειτουργεί το GPS.
Παρακάτω αναλύουμε πώς λειτουργεί αυτή η διαδικασία:
Για να λειτουργήσει σωστά, το σύστημα gps χρειάζεται 3 βασικά συστήματα :
- Το δίκτυο των δορυφόρων το οποίο βρίσκεται σε μέση τροχιά περίπου 20,200 χιλιόμετρα πάνω από την επιφάνεια της Γης.
- Οι Επίγειοί σταθμοί διαχείρισης των δορυφόρων και τέλος
- Ο δέκτης των οποίων χρησιμοποιούμε για να αναλύσουμε τα δεδομένα των δορυφόρων στο κινητό μας τηλέφωνο ή στην συσκευή που χρησιμοποιούμε.
Το σύστημα GPS δουλεύει με την παρακάτω απλή διαδικασία :
- Κάθε δορυφόρος στέλνει συνεχώς ένα σήμα το οποίο περιέχει τις πληροφορίες που χρειάζεται ο δέκτης για να εντοπίσει τη θέση του.
- Όταν ενεργοποιήσουμε τη συσκευή μας λαμβάνει τα σήματα από τους δορυφόρους που έχει σε οπτική επαφή.
- Και τέλος η συσκευή αναλύει τα δεδομένα τα οποία έλαβε και μέσω μιας απλής τριγωνομετρικής μαθηματικής εξίσωσης υπολογίζει την θέση της στον χώρο.
05.2.1.15 : RC Blocks : ( GPS Compas )
Ο δέκτης gps είναι ένα από τα βασικότερα εξαρτήματα πάνω στο uav καθώς δέχεται τα σήματα από τους δορυφόρους και μπορεί να υπολογίσει την θέση του uav στον χώρο.
Ανάλογα με το mission που τρέχουμε, υπάρχει περίπτωση να έχουμε αυτόνομη πτήση του μηχανήματος, η οποία εκτελείται κατά κύριο λόγο από τις συντεταγμένες που έχουμε δώσει στο μηχάνημα και την πραγματική θέση του μηχανήματος.
Επίσης όπως αναφέραμε προηγουμένως στην ασφαλή διαχείριση αποτυχίας το gps είναι υπεύθυνο για να επαναφέρει το μηχάνημα στην θέση από την οποία ξεκίνησε ή στην ασφαλή θέση προσγείωσης.
Επίσης επειδή ένα uav κινείται αρκετά γρήγορα υπάρχει περίπτωση να χαθούν ορισμένα πακέτα από το δορυφόρο μέχρι τον δέκτη. Χρησιμοποιώντας την πυξίδα, η οποία μας δίνει μεγαλύτερη ακρίβεια σε σχέση με την κίνηση του μηχανήματος. Υπάρχει πιθανότητα, λοιπόν, κατά την εκκίνηση της κίνησης ο offline controller να βασιστεί περισσότερο στην πυξίδα και λιγότερο στο gps και στη συνέχεια όταν έχει ακριβή δεδομένα του gps να διορθώσει την θέση του.
Πυξίδα είναι ένα από τα πιο ήπουλα εξαρτήματα πάνω στο μηχάνημα καθώς μπορεί να μας ρίξει το μηχάνημα σε δευτερόλεπτα εάν δεν είναι σωστά ρυθμισμένη μεγάλ προσοχή στην πυξίδα
Ανάλογα με το mission που τρέχουμε, υπάρχει περίπτωση να έχουμε αυτόνομη πτήση του μηχανήματος, η οποία εκτελείται κατά κύριο λόγο από τις συντεταγμένες που έχουμε δώσει στο μηχάνημα και την πραγματική θέση του μηχανήματος.
Επίσης όπως αναφέραμε προηγουμένως στην ασφαλή διαχείριση αποτυχίας το gps είναι υπεύθυνο για να επαναφέρει το μηχάνημα στην θέση από την οποία ξεκίνησε ή στην ασφαλή θέση προσγείωσης.
Επίσης επειδή ένα uav κινείται αρκετά γρήγορα υπάρχει περίπτωση να χαθούν ορισμένα πακέτα από το δορυφόρο μέχρι τον δέκτη. Χρησιμοποιώντας την πυξίδα, η οποία μας δίνει μεγαλύτερη ακρίβεια σε σχέση με την κίνηση του μηχανήματος. Υπάρχει πιθανότητα, λοιπόν, κατά την εκκίνηση της κίνησης ο offline controller να βασιστεί περισσότερο στην πυξίδα και λιγότερο στο gps και στη συνέχεια όταν έχει ακριβή δεδομένα του gps να διορθώσει την θέση του.
Πυξίδα είναι ένα από τα πιο ήπουλα εξαρτήματα πάνω στο μηχάνημα καθώς μπορεί να μας ρίξει το μηχάνημα σε δευτερόλεπτα εάν δεν είναι σωστά ρυθμισμένη μεγάλ προσοχή στην πυξίδα