























3D Printed FPV Drone 10" 2814 4S 6S RCB.UAV.001 ( STL Files )
")
")
")
")
3D Printed FPV Drone 10" 2814 4S 6S RCB.UAV.001 ( STL Files )
- Απόθεμα : 100
- Κωδικός : RCB.UAV.001
120,00€
Product Files ( Downloads )
You need to be logged in to access the downloads.
Please go to the Log In page.
Please go to the Log In page.
| File Name | Date Modified | Link |
|---|---|---|
| There are no downloads. | ||
Showing 0 to of (0 pages)
Περιγραφή & Χαρακτηριστικά
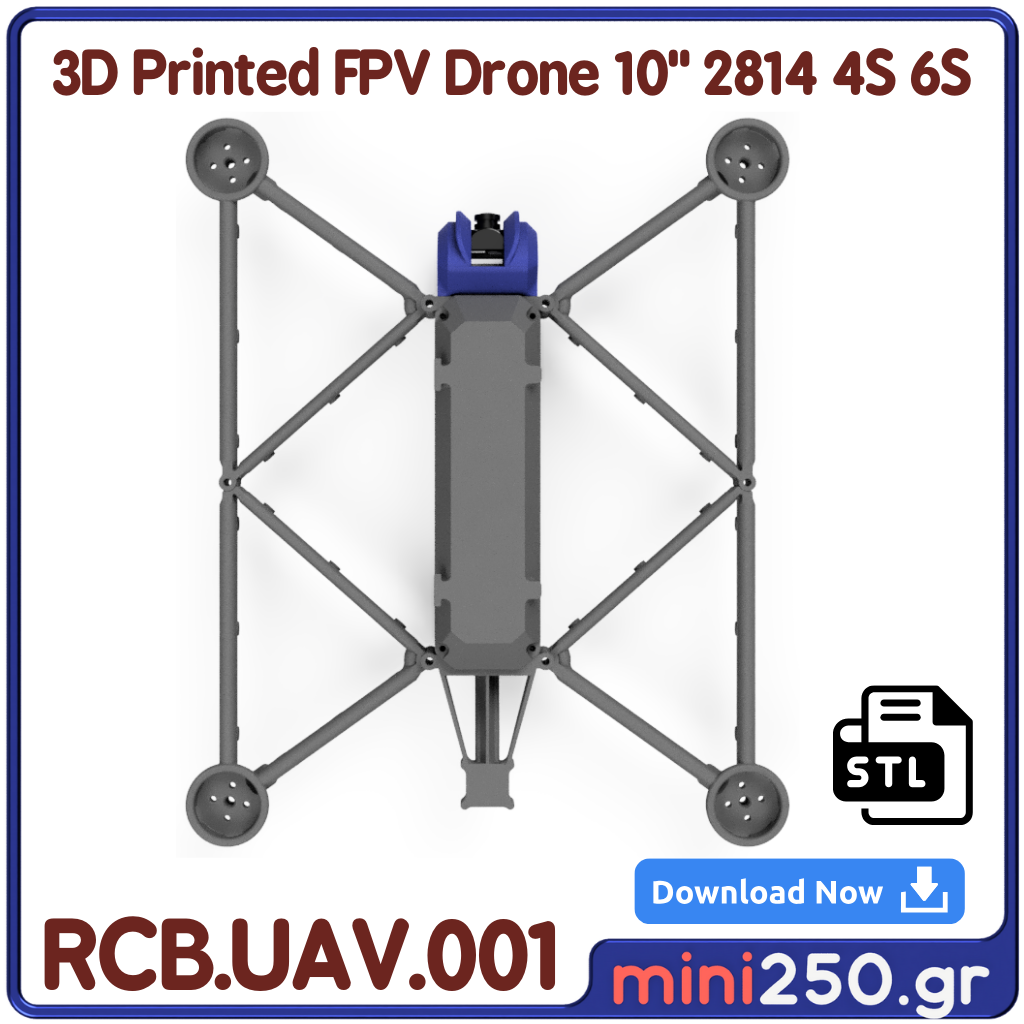
3D Printed FPV Drone 10" 2814 4S 6S RCB.UAV.001 ( STL Files )
Με την προσωπική μου εμπειρία και την τεχνογνωσία μου στην κατασκευή Drones,
σχεδίασα ένα μοναδικό μηχάνημα (Drone) που ανταποκρίνεται στις ανάγκες σου!
Τα αρχεία STL είναι ένα δημοφιλές μορφότυπο αρχείων που χρησιμοποιείται στην τρισδιάστατη εκτύπωση και τον σχεδιασμό CAD.
Μετά την ολοκλήρωση της παραγγελίας, θα λάβεις πρόσβαση στα Ψηφιακά Αρχείά, τα οποία μπορείς να κατεβάσεις στον υπολογιστή σου.
Από εκεί, μπορείς να τα μεταφέρεις σε έναν τρισδιάστατο εκτυπωτή και να δημιουργήσεις το δικό σου Drone.
Για να ολοκληρωθεί η διαδικασία, θα πρέπει να αποκτήσεις όλα τα απαραίτητα εξαρτήματα
σύμφωνα με τις προδιαγραφές και τα περιφερειακά που περιγράφονται παρακάτω.
Αφού συναρμολογήσεις και προγραμματίσεις το Drone, είσαι έτοιμος να απολαύσεις την εμπειρία της πτήσης!
Προτεινόμενα ( Parts )









FPV Drone Εξαρτήματα
 Image Caption
Image Caption
Image Gallery










































3D Printing



Tηλεκατεύθυνση
Χειριστήριο ονομάζεται η συσκευή που κρατάει ο χειριστής στα χέρια του και δίνει τις απαιρέτητες εντολές στο μηχάνημα για να τις εκτελέσει.
Συνήθως έχει δύο joystick αλλιώς gimbal των οποίων ελέγχει την κίνηση του οχήματος.
Επίσης διαθέτει αρκετούς διακόπτες και sliders μέσω των οποίων μπορούμε να προγραμματίσουμε συγκεκριμένες εντολές στο όχημα.
Συνήθως έχει δύο joystick αλλιώς gimbal των οποίων ελέγχει την κίνηση του οχήματος.
Επίσης διαθέτει αρκετούς διακόπτες και sliders μέσω των οποίων μπορούμε να προγραμματίσουμε συγκεκριμένες εντολές στο όχημα.
Ο δέκτης είναι τοποθετημένος στο μηχάνημα και συνδέεται στον flight controller.
Συνήθως η επικοινωνία είναι μέσω sbus ή crsf ανάλογα με το μοντέλο.
Σε κάθε περίπτωση χρειαζόμαστε μια ελεύθερη σειριακή επικοινωνία από τον εγκέφαλο για να τον συνδέσουμε.
Στην περίπτωση sbus συνδέουμε μόνο το sbus στο rx και χρειαζόμαστε μια ανάστροφη σειριακή.
Ενώ στην περίπτωση crsf χρειαζόμαστε μία απλή σειριακή και συνδέουμε rx και tx ανάποδα.
ι
Συνήθως η επικοινωνία είναι μέσω sbus ή crsf ανάλογα με το μοντέλο.
Σε κάθε περίπτωση χρειαζόμαστε μια ελεύθερη σειριακή επικοινωνία από τον εγκέφαλο για να τον συνδέσουμε.
Στην περίπτωση sbus συνδέουμε μόνο το sbus στο rx και χρειαζόμαστε μια ανάστροφη σειριακή.
Ενώ στην περίπτωση crsf χρειαζόμαστε μία απλή σειριακή και συνδέουμε rx και tx ανάποδα.
ι






FPV Drone : Μεταφορά εικόνας ( Video Link )
 Image Caption
Image Caption
Video Link






Δείτε Επίσης
")
")
Brand: mini250
Model: RCB.FPV.002-D
Μετά την ολοκλήρωση της παραγγελίας, θα λάβεις πρόσβαση στα Ψηφιακά Αρχείά, τα οποία μπορείς να κατεβάσεις στον υπολογιστή σου.
Από εκεί, μπορείς να ..
38,00€